视触觉传感当前面临两大核心挑战:(1)泛化性局限——现有方法对光照条件具有独特性,硬件变更时需耗费大量人力重新采集数据并训练模型;(2)计算复杂度——基于自编码器的方法会产生过高计算开销,多传感器部署时需要高性能计算设施支撑。
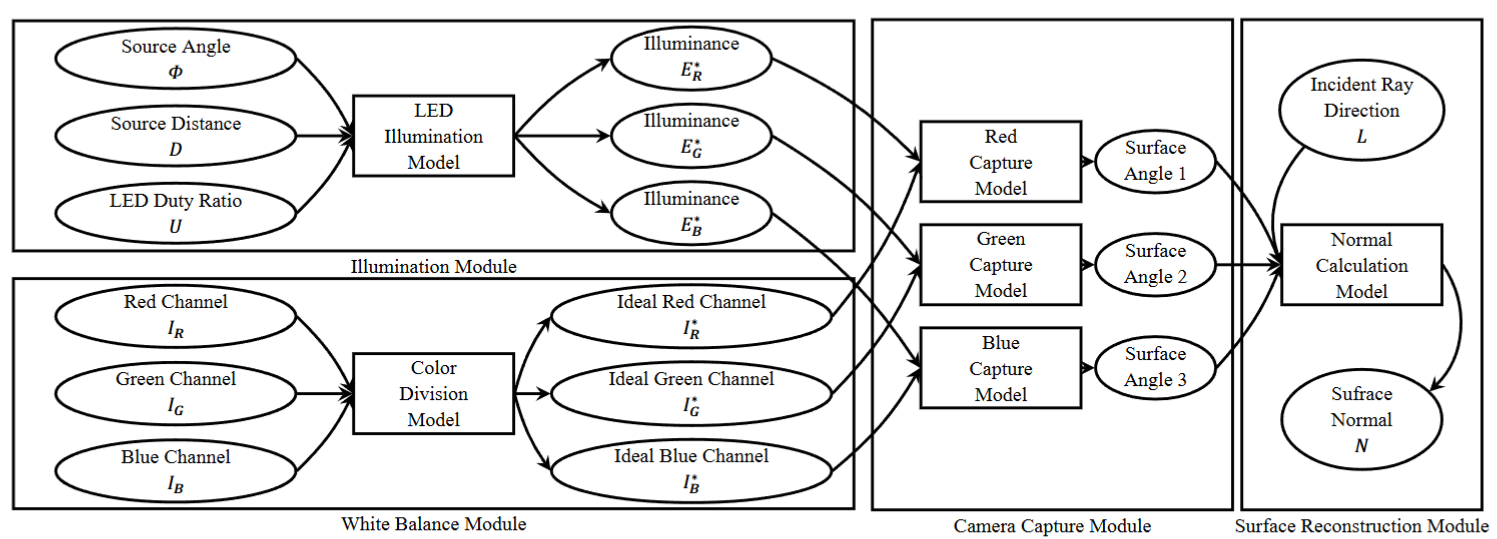
为应对这些挑战,我们提出 VLSPS(Variable Light Source Photometric StereoAlgorithm for Visual-tactile Sensors)算法。首先,我们开发了融合传感器专用光学模型与成像原理的神经网络光度立体算法,可在多变光照条件下实现表面法线估计。其次,通过系统验证训练方案,证明该方法仅需少量训练数据即可获得最优性能。最后,我们在多种接触场景(包括可变接触位置、姿态和光照配置)下定量评估系统感知精度,证实其具备鲁棒的三维重建能力。