介绍
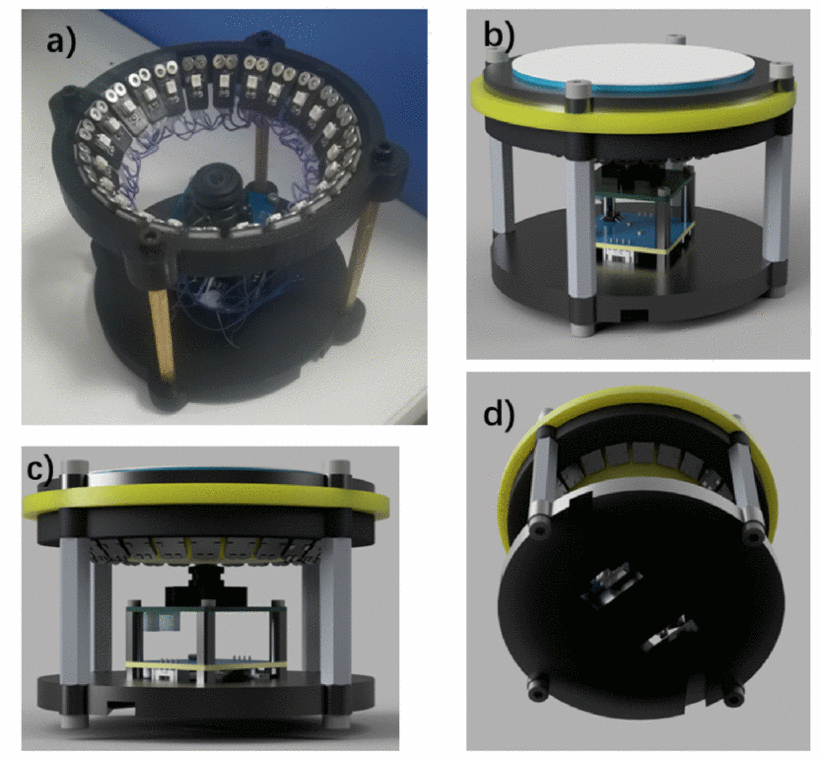
IrisTac 是基于视觉的触觉传感器,内部含有24个LED灯,可生成丰富的光照。
硬件设计
iristac硬件正在持续迭代
- version 1: 使用亚克力透镜以集中LED的光线,使光线能照射到传感器表面的中心区域。
- version 2: 使用减光镜延长相机的曝光时间,降低LED的频闪。
仿真
使用raycasting的原理,能够快速计算iristac的仿真图像。 仿真步骤:
- 计算相机每个像素对应的表面坐标。
- 计算24个LED照射在每个点处的光线的入射光方向
- 判断入射光照射时到目标点时是否被遮挡
- 计算入射光方向与表面法线方向的夹角
- 计算每个入射光线的光线强度
- 计算每个像素处光线的漫反射强度
- 计算每个像素处的颜色三色值
表面重建算法
为了能在多种光照条件下实现表面重建,开发了基于光照模型的光度立体算法以供iristac使用。 光度立体算法步骤类似仿真,具体计算步骤如下:
计算步骤:
- 对表面形状进行初始估计
- 计算相机每个像素对应的估计表面坐标。
- 计算24个LED照射在每个点处的光线的入射光方向
- 判断入射光照射时到目标点时是否被遮挡
- 计算每个入射光线的光线强度
- 根据每个像素处的颜色三色值计算每个像素处光线的漫反射强度
- 计算每个像素处的表面法线方向
- 计算表面深度
- gradient-domain methods from [[Microgeometry Capture using an Elastomeric Sensor]]
- [[Fast Poisson Solver]]
- Frankot Chellappa Algorithm from Harvard University Slides Depth from Gradient
- Frankot Chellappa Algorithm from DeepBump/module_normals_to_height.py
- 重复第一步
算法标定
标定目标是根据已知的系统输入和输出计算系统中未知的参数。
在文中提出的光度立体算法中有两个步骤需要标定:
- 漫反射强度和图像像素值的关系
- 光源的光照模型